




В последней версии Oasis montaj 2022.1 значительно усовершенствовано моделирование объектов поиска НРБ для UXO Marine. Новые функции и улучшенное моделирование объектов поиска НРБ позволяют пользователям лучше понимать свои списки объектов поиска. Более того, вы можете сократить расходы на исследования и восстановительные мероприятия с помощью оптимизированных инструментов анализа данных и моделирования, которые упрощают создание высококачественных информационных продуктов.
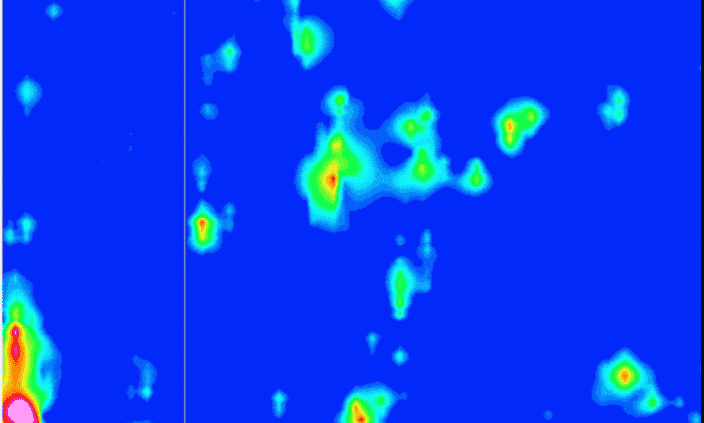
Новый инструмент Calculate Signal Strength, Signal to Noise Ratio, and Size (Рассчитать силу сигнала, отношение сигнала к шуму и размер) рассчитывает рамки полигонов объектов поиска и несколько показателей для ваших объектов поиска. Этот инструмент использует сетку или базу данных для определения полигонов вокруг каждой из ваших аномалий. В этом полигоне (рамке) данных рассчитываются несколько показателей для каждой аномалии: в частности, сила сигнала, размер, а также отношение сигнала к шуму. Затем полигоны объектов поиска можно использовать для моделирования объектов поиска при помощи Batch Fit (Пакетной подгонки).
Использование инструмента Calculate Signal Strength, Signal to Noise Ratio, and Size (Рассчитать силу сигнала, отношение сигнала к шуму и размер) для расчета рамок полигонов объектов поиска
Поскольку настоятельно рекомендуется просмотреть полигоны на вашей карте, прежде чем использовать их для моделирования и анализа объектов поиска, вы можете воспользоваться новым инструментом Redefine Target Windows (Заново определить рамки объектов поиска) для редактирования ваших полигонов. Например, шум в данных может вызвать двойной пик в аномалии, в результате чего полигон не полностью охватывает ваш объект поиска.
Использование инструмента Redefine Target Windows (Заново определить рамки объектов поиска) для редактирования полигонов
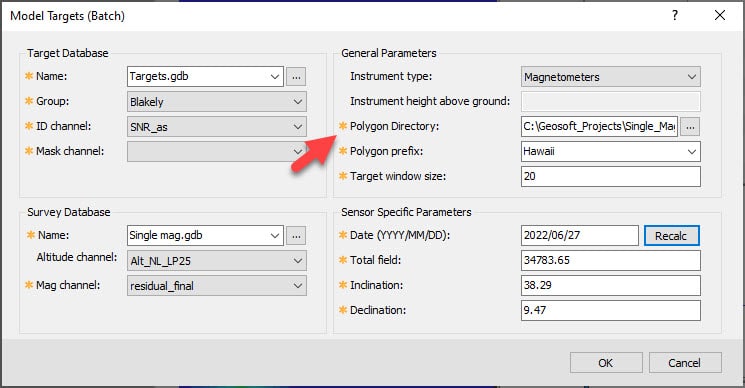
Пакетное моделирование в UXO Marine
Опция Calculate Target Size (Вычислить размер объекта поиска) теперь называется Calculate Euler Target Size (Вычислить размер объекта поиска по методу Эйлера), так как это лучше описывает ее функционал: вычисление размера рамки в деконволюции Эйлера Она по-прежнему вычисляет размер канала, который равен половине ширины прямоугольной рамки вокруг вашего объекта поиска. Тем не менее, полезно проверять рассчитанные размеры и корректировать их при необходимости, поэтому мы добавили новый инструмент под названием Plot Euler Target Windows (Отобразить рамки объектов поиска по методу Эйлера), который отображает канал вашего размера в виде символа пропорционального размера на вашей карте.
Это позволяет вам быстро визуализировать рамки объектов поиска, чтобы определить, подходят ли они по размеру для моделирования ваших объектов поиска. Если вы внесете какие-либо изменения в канал размера, вы можете быстро запустить его повторно и проверить, как выглядят изменения.
Визуализация рамок объектов поиска при помощи функции Plot Euler Target Windows (Отобразить рамки объектов поиска по методу Эйлера)
Завершив моделирование объекта поиска, вы можете лучше понять и задокументировать результаты, визуализируя как смоделированные, так и наблюдаемые данные с остаточными данными (разница между наблюдаемыми и смоделированными результатами).
Новый инструмент Create Modelling Results Map (Создать карту результатов моделирования) создаст карту для каждого объекта поиска в вашей группе для выбранных наблюдаемых значений. Этот инструмент использует базу данных объектов поиска и базу данных моделирования, которая представляет собой базу данных, содержащую данные в рамках аномалий, которые использовались для моделирования.
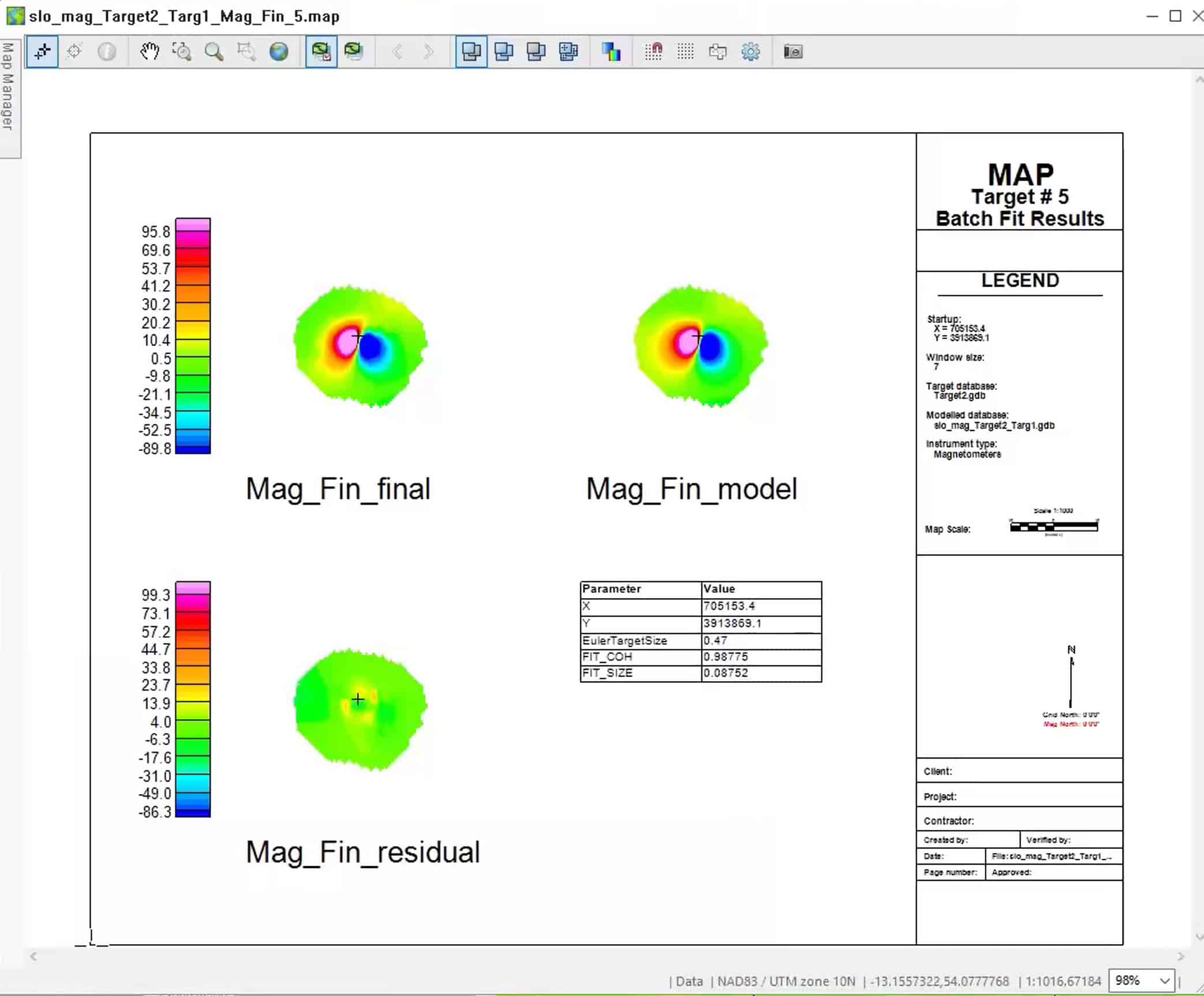
Создание карты для каждого объекта поиска при помощи инструмента Create Modelling Results Map (Создать карту результатов моделирования)
Новый инструмент Merge Target Databases (Объединить базы данных объектов поиска) объединяет до четырех отдельных баз данных объектов поиска в единую комбинированную базу данных, что полезно, когда несколько списков объектов поиска создаются на основе показаний разных датчиков или типов данных. Например, у вас может быть список магнитных аномалий и список объектов поиска гидролокатора бокового обзора, и вы хотели бы сравнить, какие объекты поиска были обнаружены с использованием обоих методов. Этот тип анализа может помочь вам определить интересующие вас объекты поиска.
В инструменте Merge Target Databases (Объединить базы данных объектов поиска) вы можете указать радиус поиска, который будет группировать объекты поиска в пределах этого радиуса. Окончательная объединенная база данных объектов поиска будет включать две группы: один список со всеми объектами поиска, которые вы объединили, и второй, где мы определили группы объектов поиска в пределах указанного радиуса.
Как всегда, мы будем рады любым отзывам и дальнейшим вопросам, которые могут у вас возникнуть в отношении UXO Marine или любого другого модуля в Oasis montaj. Надеемся, что эти улучшения станут для вас актуальными и полезными. Если у вас есть вопросы, зарегистрируйтесь для участия в бесплатном вебинаре и сессии ответов на вопросы либо присылайте ваши вопросы или заявки по адресу [email protected]